
Exoskeletal Arm Interface
The goal of our project is to transfer one arm’s movement through an exoskeletal sensor and into another person’s arm using direct electrical muscular stimulation. This blog is a starting point for looking at the design of exoskeletal arm interface.
The broader design challenge for this input half of our project is to make a kinesthetic exoskeletal arm interface. There are a lot of ways to try and turn arm motion into input data, including computer vision and gloves. This exoskeletal strategy relies on simple sensors like potentiometers and a close physical bond to the body rather than more complicated sensor-software systems and allows for bigger gestures, haptic feedback, and the ability to help support the arms and prevent fatigue (an often over-looked problem with gestural interfaces).
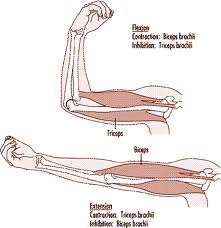
For this project we are primarily looking at the elbow joint’s movement from 180 degrees straightened to approx 25 degrees fully flexed. The biceps and the triceps — two relatively large and exposed muscles that seem like good candidates for electrical stimulation — control this degree of freedom.
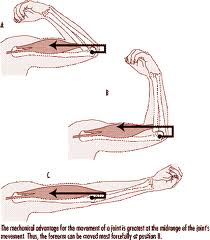
Measuring this motion also seems relatively straight forward — a potentiometer at the joint could measure the angle of the joint and the following arm could be sent a signal based on the changing angles. The academic papers I ran across talked a lot about different forms of robotic control, specifically forward and reverse kinematics, so I looked it up. Forward kinematics is a strategy for robotic control where you specify the joint angles directly, and run the actuators from that information. Reverse kinematics is where you specify the end points of the appendage being controlled and do math to run the actuators at the joints based on that information. I think we want to do some form of forward kinematics — we have more hope of being expressive than precise with our arm zapping.


These first two design inspiration images are just braces. These are designed to stay on an arm and keep it only moving the way it should move. I think that our sensor will end up looking similar to these, but with less emphasis on stability and more emphasis on precise positioning. If there were a potentiometer in the joint of these however, it would make an excelent sensor for measuring the angle of the elbow joint.


This gameing system is the closest design to what we are thinking about producing that I have found so far. It has more than a potentiometer, including some accelerometers as well as haptic feedback. We could consider including feedback in the exo-sensor, maybe allowing the leading arm feel how much current was flowing into the following arm without being shocked itself. This could allow the leader to control how much current was flowing into the follower.
Most of the exoskeletal examples I have found are augmentations, not just sensors. These involve the entire arm from shoulder to wrist (and sometimes even including the detailed hand) because they are trying to help humans do work.
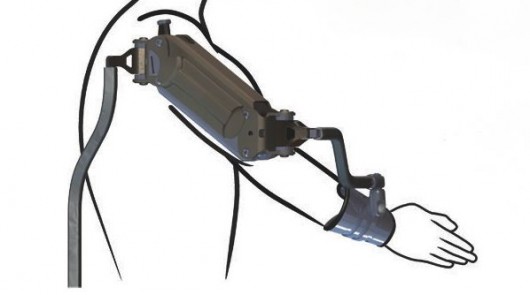
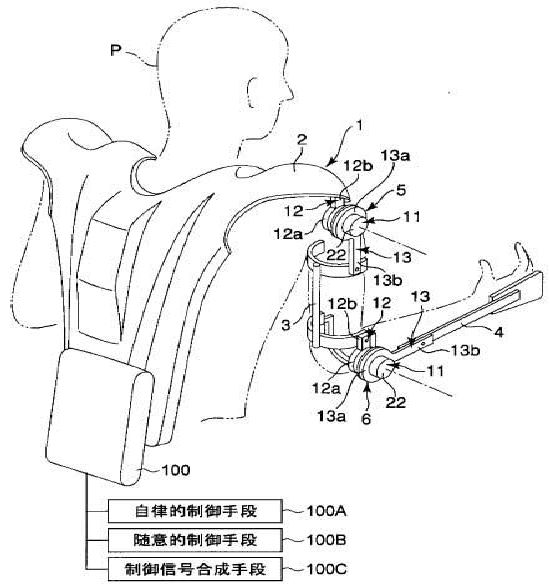
The above is an actual load bearing exoskeletal aid. You can buy it at Robotshop.com for $3,800. It is designed to help manufacturing line workers pick up items with their arms extended, saving them from over exerting their muscles and chronic motion syndromes. It is an augment more than a sensor, but it is a good example of an exoskeleton that is produced commercially, not just experimentally. It also only focuses on the lifting abilities of a users’ hands — it tries to reduce the strain on the end of the users’ arm-lever. This type of back-mounted orientation seems to be the main way augmenting lifting exos- tend to be designed. It also is clear that something on the back is necessary if the shoulder degrees of freedom are important to us or we want to support the arms physically.
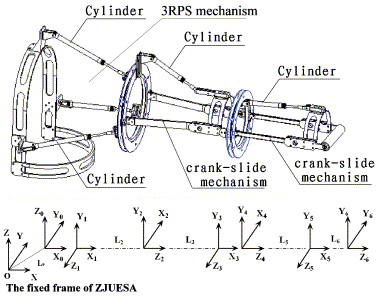
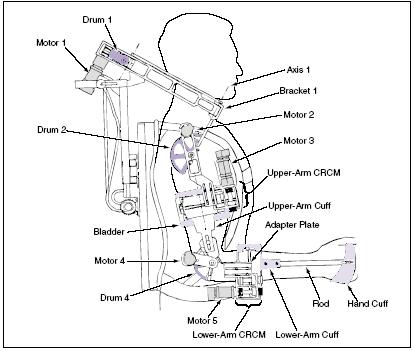
These illustrations are from a scientific paper that examines how to make an exoskeleton that only uses cables to power it. Again, it manipulates the users arm, it is not an interface per-say. But the article has lots of useful things to say about degrees of freedom and placing joints outside of the body that corespond to joints inside the body. This paper and this paper are also useful for this reason.
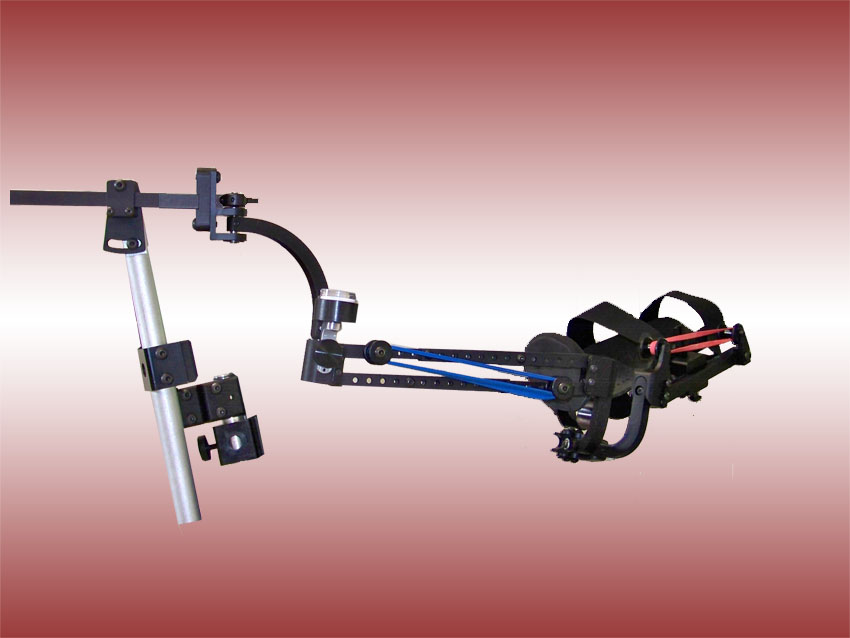
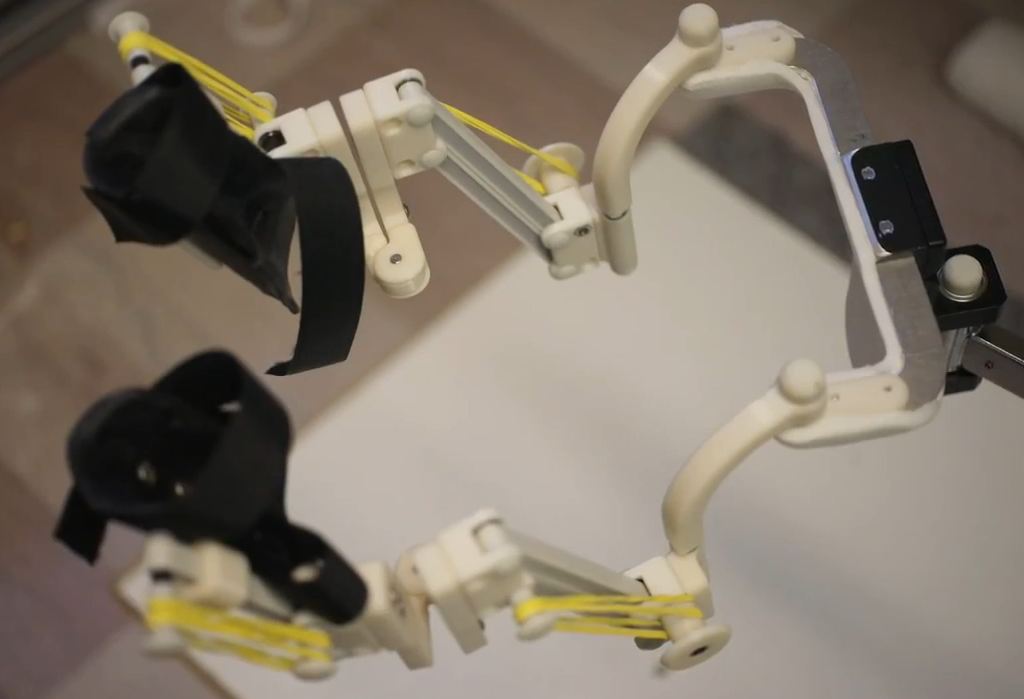

The above are examples of a WREX system — a non-robotic exoskeletal arm agumentation. It helps those with limited mobility by lowering the torque on the shoulder and elbow joints, assisting movement with elastic bands. The system on the little girl in the bottom pictures is an example of a 3D printed exoskeleton. 3D printing is used because children at this age grow so fast, and the components of the system need to be easily replaceable with different sized pieces. 3D printing also allows the components to be built from 3D scans of her body, ensuring they will fit her anatomy. Precise fit seems to be an important part of this type of interface. The WREX system seems like an elegant mechanism for not only supporting the arms, but also measuring the various angles of the joints. Again, potentiometers at each hinge could easily provide the important information.
I think that a device somewhere between the arm brace and the WREX and with a little bit of game-controller mixed in will be able to control another person’s arm no problem!
Nice work – happy to see you found the WREX system, the videos of the little girl using it are pretty amazing.