
With Andy Sigler and Carl Jamilkowski
We have made some good progress refining and researching our project. We have taken out the input side of the equation, and instead are focusing just on the problem of moving a person’s arms non-autonomously.
To do this, we will pair electro-muscular stimulation with a WREX system. Electro-muscular stimulation, of the super-dermal variety we will be using (no needles!), is able to stimulate large muscles and make them move — but with only a fraction of the strength normal nervous stimulation can achieve. To mitigate this problem, we will design a worn device that allows the arms to move despite this minimal muscular strength inspired by the WREX, but opensource.
The WREX (Wilmington Robotic Exoskeleton) is the “state of the art in passive devices for enhancing limb movement in people with neuro-muscular disabilities… the exoskeleton has two links and four degrees of freedom. It uses linear elastic elements that balance the effects of gravity in three dimensions.” — Rahman et al. 2006 It offers four degrees of freedom and adjustable support with replaceable, affordable elastic bands. 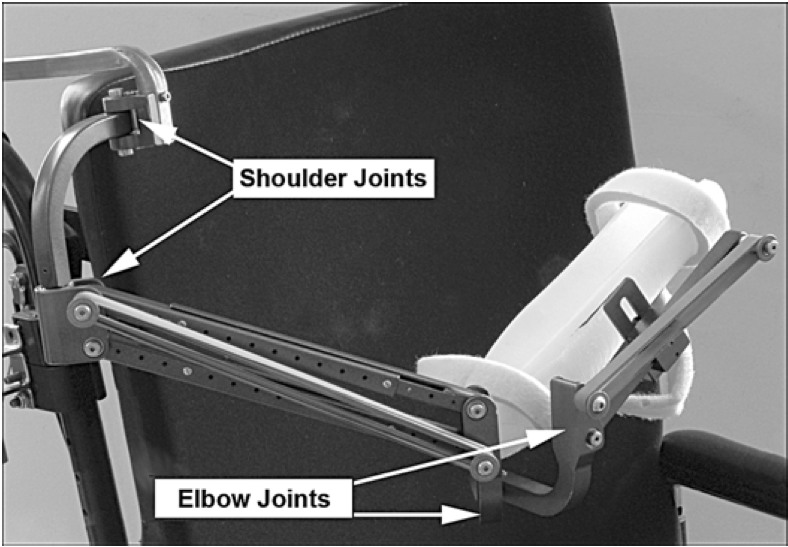
It allows for true 3D movement of the arm, a challenge up to this point for exoskeletal aparati, but two rotational degrees of freedom at the shoulder and one at the elbow are traded for the support the arm offers. One other challenge the WREX has solved is the non-liniar torque requirements experienced by arms — it is a logarithmic not linear, change in torque between holding the arm straight up and straight out. Because of this, the elastic attachments are designed to move sinusoidally in relation to the axis of rotation by using parallelogram geometries.
The joints and arm supports will be off-the-shelf hardware and 3D printed connectors, while the long structural supports will be CNC routed or laser-cut; the designs will be put online with assembly instructions.
As for the electro-stimulation, we gave it our first try over the weekend. You can see the results in this video:
Obviously it didnt work. We are meeting with Danny Rozin Tuesday night to talk through the electronics more — everything we are using has a ton of resistance, which is nice since its our arms we are talking about, but we were running into problems trying to get the circuits to even work, and could always use more safety pointers.
After we are able to send electricity to the arm, we will start being more precise about which muscles we want to target.