
Literature Review of Robotic Arms
Please see my blog
Hannah’s Lit Review
Follow up Final Project Post
My vote for the skeleton: “Tom”
MMG- Mechanomyogram
Mechanomyogram
and a guy who uses it to make sound:
Marco Dunnarumma
Daito Manabe
Ergonomic Response
Reading this paper had my hands aching. Perhaps a strange way to begin a response to an academic journal, but my hands ached fairly noticibly when the arthritis was detailed in any way.
That aside, the parts of the paper that I found interesting were those about gaguing the perceptions of the syringe. I never thought of inquiring about how a syringe feels in ones hand or how the perceptions of the instrument of medicinal delivery affect paitients’ willingness to comply with their regimin. A syringe, to me, is a syringe. How the design influences potential success of a course of treatment.
(My first thoughts went to diabetics who must prick themselves for their health. These meters come in a variety of designs, and I wonder at the ergonomic methodologies of these designs affect the patients’ successes with monitoring their blood sugar.)
Another interesting note about the methods used in deciphering the effictiveness of the new syringe’s design was in how much of the medicine was reaching the body. The measurement of force through the use of a dynometer made me think of my father who worked on “dynos” all of the time for NASCAR:
I never knew what those were.
Dynos are super cool! They mesure Torque, Force and Power. The dynometers used for the medical and ergonomics fields transfer a persons’ abilities to apply force or torque to a lever or pulley. Then math is applied – multiplying force by the perpendicular distance from the force and the axis. Those for motors measure and compare power transfer at different points on a vehicle.
Shoulder Arm Rotation
I have chosen to replicate the shoulder.
Given the above diagram and thinking about which hinge would allow for the full rotation of the shoulder, I remembered the ball joints laying around my dad’s shop.
The ones I purchased look like this:

The hip joint does not do the same kind of rotation that the shoulder does.
The photo below illustrates the problem (that is the maximum angle of rotation once the dowel has been inserted):

So I cut a piano hinge
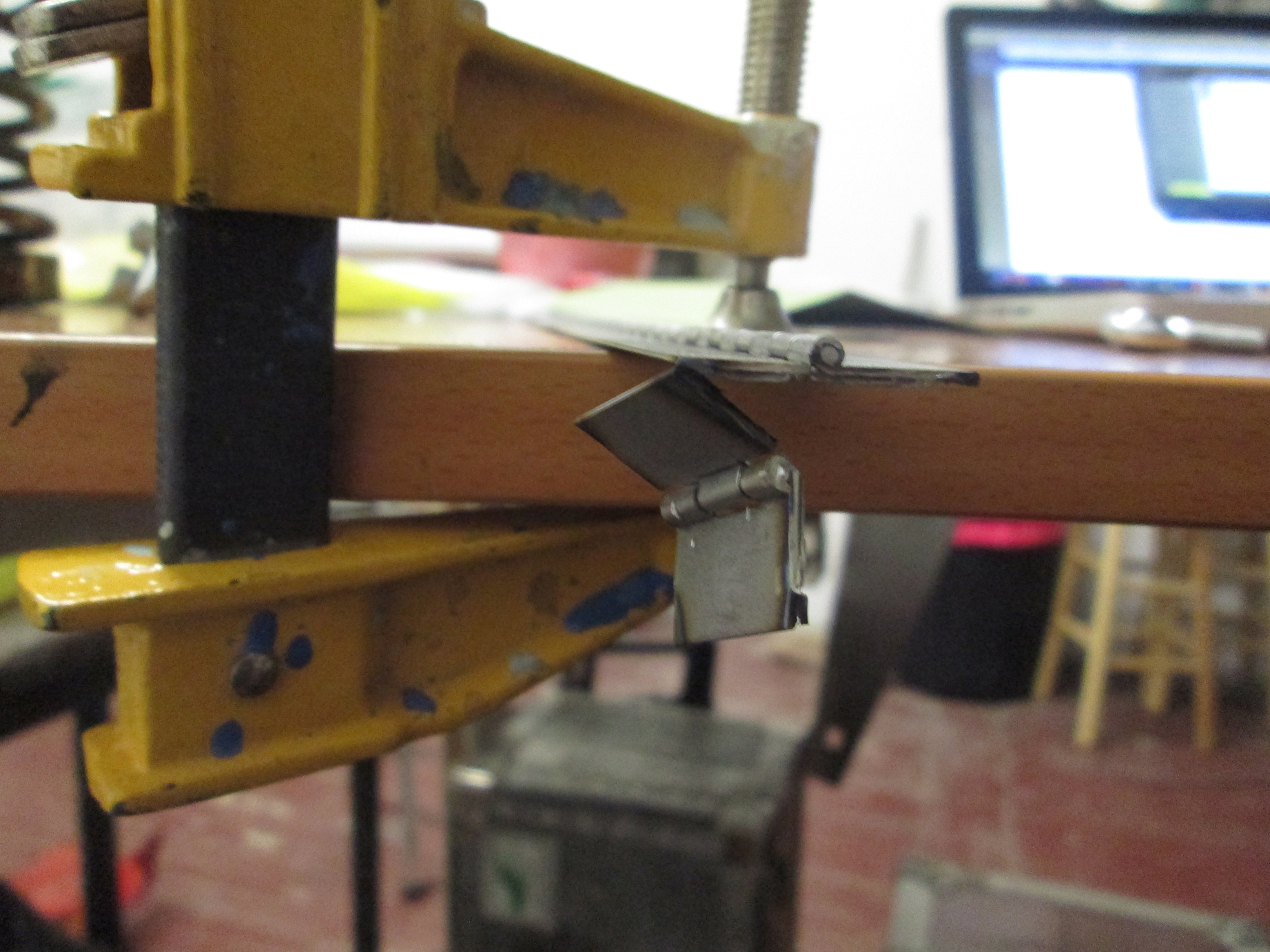
And put the dowel through a bit of aluminum.
And put a dowel in the piano hinge.
And then attached the hinge to the bit of metal:

So then I needed a counter-weight so that the “arm” would rest like it would on the body.

Initial Research for Biomechanics// Insect Locomotion
links broken in this post. For links please see my blog:
http://itp.nyu.edu/~hm825/mishin_control/?p=528
Biomimetics defined by Merriam-Webster:
“the study of the formation, structure, or function of biologically produced substances and materials (as enzymes or silk) and biological mechanisms and processes (as protein synthesis or photosynthesis) especially for the purpose of synthesizing similar products by artificial mechanisms which mimic natural ones”
The aspects of biomechanics which are the most compelling, for me, are not associated with the human form specifically, but rather in how bodies in motion (with force and weight) are propelled through space. How the variety of beings in the physical world evolved (to some various extent) the capabilities to adapt to terrain, to adjust speed, vary their weight and to do many of these adjustable movements while performing other tasks.
When I saw this video I realized that I had found my subject:
Though I may not be specifically interested in the jaws of these ants, I am certainly interested in how they move and in insect locomotion in general.
So, I began reading on insect locomotion with this paper whose keywords also include (to my delight) “biomimetic, locomotion, coordination, sensory feedback, biorobotics”:
Delcomyn, Fred. “Insect Walking and Robotics” Annual Review of Entomology 49:51-70 (2004) ProQuest. Web. 03 Jan 2013.
(It can be found through here as well: http://www.annualreviews.org/doi/abs/10.1146/annurev.ento.49.061802.123257)
Particular projects/engineers in the robotics field want to create insect-inspired walking forms (for various reasons that bi-pedal robots or even quadrupedal forms may not be desireable, including the need to design autonomous robots to tackle severely rough terrain) Biologists can, in turn, test their hypothesis about insect locomotion through working with engineers to create insect-inspired robots.
He argues the importance of sciences outside of mechanical engineering and biomechanics, largely neurology, as extremely important to understanding insect locomotion. He discusses the role of understanding the neurological aspect of biological coordination and specifically how the brain affects the gait of an insect and draws a parallel to the computational design of specific robotics. He explains that roboticists wishing to make a walking many legged robot must ask themselves the same questions that biologists ask about insect locomotion.
Bassler and Buschges posited that “all rhythmic movements (in insects) are generated by central pattern generators (CPGs) whose action can be modified and adjusted by sensory (peripheral) influences.” Simply: one unit (in the brain) controls all legs of any given insect. This referenced research is about the import of the central nervous system to locomotion as it “is capable of generating a pattern of alternating activity” in the legs of insects.
He then discusses recent studies on the biomechanical aspects of insect locomotion and refutes the neuron-only argument, citing studies wherein insects have recovered from perturbances to gait much more quickly than can be explained by the firing of neurons (i.e. a CPG). He cites studies that show insect locomotion is instead founded in the physical characteristics and “body plan” of the insect which compensate for sensory perturbances in the rhythms of the insects’ gait.
He references, when discussing roboticists whose work falls into this realm (insect – biomimetics), Carnegie-Mellon’s Dante and Dante II.
He then begins to delve into the biomimicry of robotics, discussing everything from controlling the robot to designing its locomotion as founded in biology.
He mentions several historical components meant to simulate muscle movement, including pneumatic devices such as McKibben actuators (a 1950’s invention intended to mimic muscle contractions.) Pictured below :

and can generate movement like this:
He also discusses several roboticists working in insect inspired projects:
Begin at 3:01:
Kirchner used the CPG method of motor control (Central Pattern Generation, mentioned above).
Whereas this robot (below) has no central control, as each leg has separate control networks for swing and stance:
The Quinn/Ritzmann group has a paper establishing the biometrics of cockroach locomotion as applied specifically to robotics.

(http://biorobots.cwru.edu/publications/CLAWAR04_Wei_MecharoachII.pdf)
I will gleefully be reading this next!
Delcomyn then states that it is his belief that to fully incorporate biological design in the field of robotics is impossible, even with the increase in computing powers. He states that to create a fully biomimetic robot, one must incorporate a suite of redundant sensors and actuators and linear control systems for these sensors and actuators.
The study of biomechanics as a means to biomimetic robotics is elemental to the field. He states that Quinn/Ritzmann has proven this to be the case.
He states that in order for biomimicry to be achieved, biologists, roboticists and biomechanists must all work together to construct the robot and deconstruct the biological creatures they copy, as “engineering can contribute to the study of animal behavior” as much as engineering can glean from biology.